A set of locations in space is a spatial point pattern: earthquake epicenters, locations of trees, animal habitats etc. The arrangement of these points is generated by a combination of deterministic and stochastic mechanisms and is modelled using a point process.
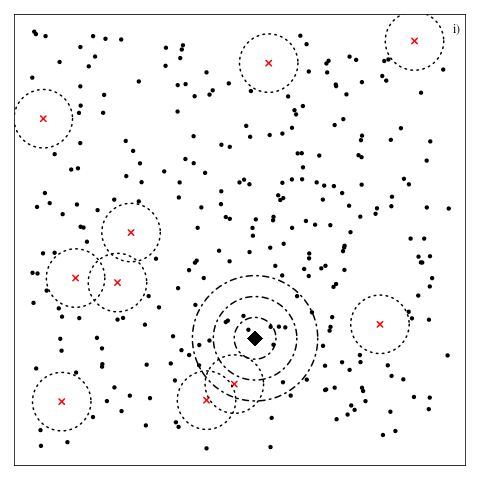
A void point process has regions devoid of points where you might otherwise expect to see points given the background intensity of the process. These areas are termed ‘voids’ and may represent, for example, regions of a forest where storm damage has resulted in missing trees.
Previous work has estimated parameters of a void point process using a pseudo-likelihood-based approach. This project aims to investigate using a Bayesian framework (e.g., MCMC) to fit such models and compare the reliability of the method to the Palm likelihood approach.
No prior knowledge of point processes is required; however, a student should be comfortable with the concepts covered in STATS730 and STATS731.